Tutorial: Controlando LEDs con Arduino y el Monitor Serie (con funciones)
Introducción: En este tutorial, aprenderemos cómo controlar dos LEDs utilizando un Arduino y el Monitor Serie. El Monitor Serie nos permite interactuar con nuestro Arduino desde la computadora enviando datos a través del puerto serie. Veremos cómo crear un programa sencillo que nos permitirá encender y apagar dos LEDs con solo ingresar un número por el monitor serie.
Materiales:
- Arduino (cualquier modelo compatible)
- Dos LEDs
- Dos resistencias de 220 ohmios (o las necesarias para los LEDs)
- Protoboard (placa de pruebas) y cables para conexiones
- Computadora con el IDE de Arduino instalado
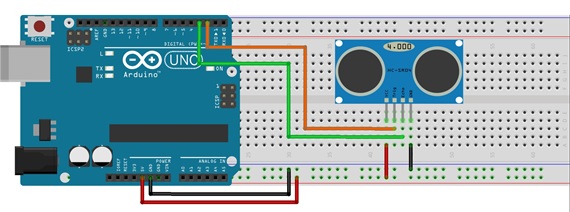
Circuito: Conecta los LEDs al Arduino utilizando las resistencias para limitar la corriente. El LED 1 estará conectado al pin 13 y el LED 2 al pin 12. Asegúrate de conectar el ánodo (lado más largo del LED) a la resistencia y el cátodo (lado más corto) al GND (tierra) del Arduino.
// Definir los pines a utilizar
const int ledPin1 = 13; // Conecta el primer LED al pin 13
const int ledPin2 = 12; // Conecta el segundo LED al pin 12
void setup() {
Serial.begin(9600); // Inicializar el monitor serie
pinMode(ledPin1, OUTPUT); // Configurar el pin del primer LED como salida
pinMode(ledPin2, OUTPUT); // Configurar el pin del segundo LED como salida
}
void loop() {
if (Serial.available() > 0) {
int option = Serial.parseInt(); // Leer el número ingresado por el monitor serie
if (option == 1) {
encenderLed1();
} else if (option == 2) {
encenderLed2();
} else {
Serial.println("Opción inválida. Intenta nuevamente.");
}
}
delay(1000); // Pequeño retardo para evitar lecturas rápidas del monitor serie
}
void encenderLed1() {
digitalWrite(ledPin1, HIGH);
digitalWrite(ledPin2, LOW);
Serial.println("LED 1 encendido, LED 2 apagado.");
}
void encenderLed2() {
digitalWrite(ledPin1, LOW);
digitalWrite(ledPin2, HIGH);
Serial.println("LED 1 apagado, LED 2 encendido.");
}
Funcionamiento: Cuando cargues el programa en tu Arduino y lo conectes a tu computadora, abre el Monitor Serie en el IDE de Arduino. El programa estará esperando que ingreses «1» o «2» por el Monitor Serie. Si ingresamos «1», se encenderá el LED 1 y se apagará el LED 2. Si ingresamos «2», se apagará el LED 1 y se encenderá el LED 2.
Conclusión: Controlar LEDs mediante el Monitor Serie es una forma sencilla de interactuar con nuestro Arduino y realizar acciones específicas con solo ingresar un número. Puedes utilizar este principio para desarrollar proyectos más complejos o para aprender más sobre el manejo de entradas y salidas en Arduino.
Espero que este tutorial te haya sido útil y que puedas aplicarlo en tus propios proyectos.